
Mathematics, 25.01.2022 18:00 iris7324
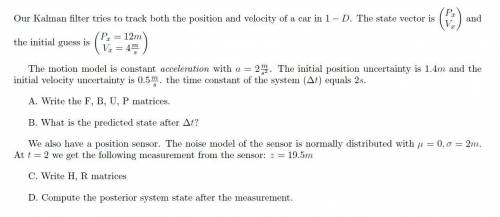
Our Kalman filter tries to track both the position and velocity of a car in 1 −D. The state vector is
Px
Vx
and
the initial guess is
Px = 12m
Vx = 4m
s
The motion model is constant acceleration with a = 2m
s2 . The initial position uncertainty is 1.4m and the
initial velocity uncertainty is 0.5m
s . the time constant of the system (Δt) equals 2s.
A. Write the F, B, U, P matrices.
B. What is the predicted state after Δt?
We also have a position sensor. The noise model of the sensor is normally distributed with μ = 0, σ = 2m.
At t = 2 we get the following measurement from the sensor: z = 19.5m
C. Write H, R matrices
D. Compute the posterior system state after the measurement.
2

Answers: 3
Another question on Mathematics
Mathematics, 21.06.2019 16:00
Which term best describes the association between variables a and b
Answers: 1
Mathematics, 21.06.2019 19:30
Abird on top of a 200 ft bridge tower sees a man standing on the lower part of the bridge (which is 50 ft above the ground). the angle of depression from the bird is 26 ̊. how far is the man from the base of the bridge tower? with explanation and pictures .
Answers: 1
Mathematics, 21.06.2019 21:30
You dug a hole that was 8 feet deep. after taking a short break, you dug down 3 more feet in the same hole. when finished digging, a tractor accidentally filled the hole with 4 feet of dirt. how deep is your hole now?
Answers: 2
You know the right answer?
Our Kalman filter tries to track both the position and velocity of a car in 1 −D. The state vector i...
Questions



Mathematics, 18.12.2019 19:31
Social Studies, 18.12.2019 19:31
Mathematics, 18.12.2019 19:31


Computers and Technology, 18.12.2019 19:31

Biology, 18.12.2019 19:31



